 |
Главная |


Дифференциальные уравнения равновесия
|
из
5.00
|
Пусть  — произвольный объём тела ограниченный замкнутой поверхностью
— произвольный объём тела ограниченный замкнутой поверхностью  .
.
Вектор массовых сил, отнесённый к единичному объёму, обозначим  , а вектор поверхностных сил, действующих на единичную площадь
, а вектор поверхностных сил, действующих на единичную площадь  , где
, где  — нормаль к поверхности в данной точке.
— нормаль к поверхности в данной точке.
Главный вектор внешних сил, действующих на тело, состоящий из главного вектора объёмных сил равен нулю:
Спроектируем это равенство на ось X:
Используя первую из формул (4) и учитывая (3) получим

С помощью формулы Грина-Остроградского преобразуем поверхностный интеграл к объёмному.
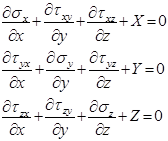
Т.к. условия равновесия должны соблюдаться для любого объёма, то подынтегральная функция должна быть равной нулю в любой точке тела. Аналогичным образом, проектируя векторное равенство (*) на оси Y и Z получим систему дифференциальных уравнений равновесия.
Деформированное состояние в точке
Деформированное состояние в точке определяется тензором деформаций. Т.е. удлинение в данной точке по любому направлению может быть вычислено, если заданы удлинения по трём взаимно перпендикулярным осям и углы сдвига по трём взаимно перпендикулярным площадкам, нормалями к которым служат оси.
Тензор деформаций выглядит
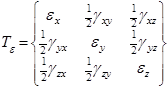
Здесь  ,
,  ,
,  — деформации относительного удлинения в направлении соответствующих осей.
— деформации относительного удлинения в направлении соответствующих осей.
 ,…,
,…,  — углы сдвига в соответствующих координатных плоскостях.
— углы сдвига в соответствующих координатных плоскостях.
Связь между компонентами тензора деформаций и перемещениями
Рассмотрим малый элемент, который в процессе деформации изменил свою конфигурацию. На рисунке показана одна из граней, совпадающая с плоскостью осей X и Y:
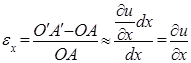
аналогично 
Угол сдвига — это угол, на который изменится первоначально прямой угол, т.е.
Аналогично определяется и другие компоненты тензора деформаций. Итак! Соотношения Коши:
 ;
;  ;
;  ;
;
 ;
;  ;
; 
Шесть компонент тензора деформаций выражаются через три компоненты вектора перемещения. Отсюда следует, что компоненты тензора деформаций не являются независимыми. И в самом деле, они связаны соотношениями называемыми уравнениями совместности деформаций.
Условиям совместности деформаций можно придать следующий смысл. Разрежем тело на малые элементы, деформируем каждый из элементов в отдельности и соберём из деформированных элементов тело. Тогда, если деформации правильные, т.е. удовлетворяющие уравнениям совместности, то собранное тело не будет иметь разрывов и пустот.
Обобщённый закон Гука
Будем основываться на известном нам законе Гука для одноосного состояния

 ,
, 
и принципе независимости действия сил.
Обратим внимание на такой факт, что с точностью до малых высшего порядка, нормальные напряжения не вызывают сдвигов, а в свою очередь касательные напряжения не вызывают удлинений.
Рассмотрим малый элемент (рис.50).
Воспользуемся принципом независимости действия сил.
1) Пусть действуют только напряжения  .
.
 , тогда
, тогда  ;
; 
2)  ;
;  ;
;  ;
; 
3)  ;
;  ;
;  ;
; 
При совместном действии всех трёх напряжений
Аналогично определяется и деформации  и
и  .
.
В результате получаем уравнения называемые обобщённым законом Гука.
 ;
;
 ;
;
 ;
;
К таким уравнениям нужно добавить ещё три соотношения
 ;
;  ;
; 
Три дифференциальных уравнения равновесия, шесть соотношений Коши и шесть соотношений обобщённого закона Гука составляют систему уравнений теории упругости, в которых неизвестными будут шесть компонент тензора напряжений, шесть компонент тензора деформаций и три компоненты перемещения.
|
из
5.00
|
Обсуждение в статье: Дифференциальные уравнения равновесия |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы