 |
Главная |


Составление принципиальной электрической схемы цифровой системы управления приводом робота.
|
из
5.00
|
Описание принципиальной схемы управления приводом
робота.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КР-02068982-220301-2012-15-ПЗ |
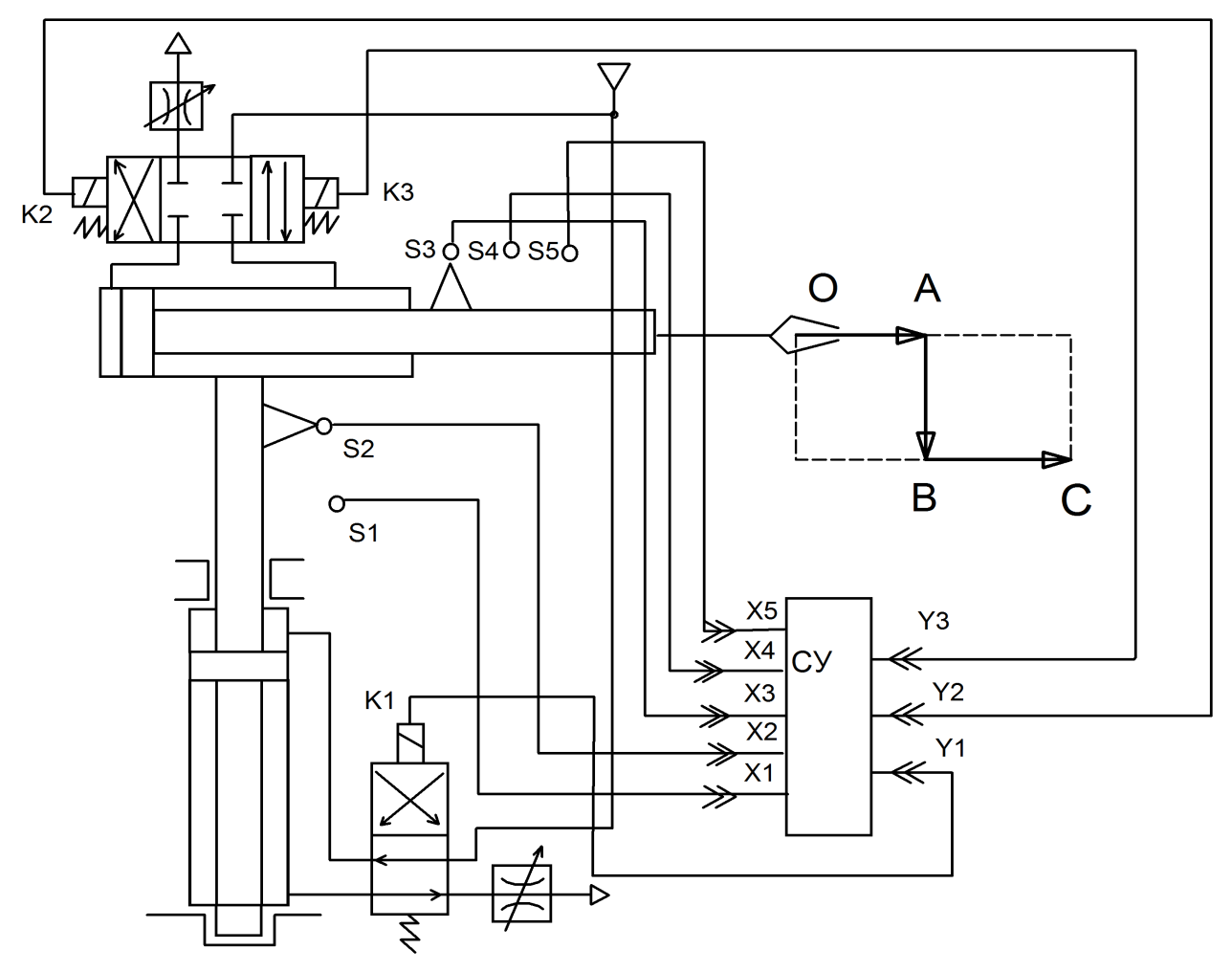
Рис. 1. Принципиальная схема управления приводом робота
Принципиальная схема управления приводом робота состоит из пневмоцилиндра ЦП, обеспечивающее перемещение схвата робота по вертикали и пневмоцилиндра ЦР, обеспечивающего перемещение по горизонтали. Пневмоцилиндры управляются электропневмораспределителями ЗП и ЗР, имеющими электромагниты К1, К2 и К3 соответственно. Управляющие сигналы Y1 Y2 и Y3 для магнитов формируются кольцевыми выключателями S1 и S2. Направление подачи воздуха изменяется переключением золотника электропневмораспределителя. Золотник пневмораспределителя размещается в корпусе электропневмораспределителя и перемещается внутри его под действием электромагнита с одной стороны и возвратной пружины с другой стороны. Данный электропневмораспределитель является двухпозиционным, при К=0 золотник находится в положении указанном на рисунке, т.е. присоединена
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КР-02068982-220301-2012-15-ПЗ КР-02068982-220301-2012-05-ПЗ КР-02068982-220301-2012-05-ПЗ |
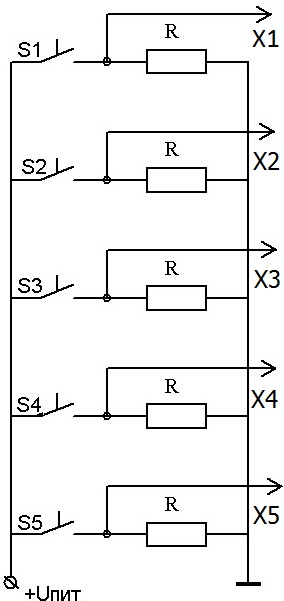 Таким образом, состояние привода в каждый момент времени определяется комбинацией сигналов, поступавших от конечных выключателей S1 , S2 , S3 , S4,и включением или выключением управлявших электромагнитов К1 и К2 распределителей. Состояние конечных выключателей S1 , S2 , S3 , S4 преобразуется в потенциальные сигналыХ1 , Х2 , Х3 , Х4 (например, с помощью схемы включения, показанной на рис. 2); они подаются на вход системы управления СУ. В зависимости от значения входных сигналов X и требуемой последовательности перемещений система управления СУ вырабатывает сигналы управления У1 и У2 распределителями К1 и К2 .
Таким образом, состояние привода в каждый момент времени определяется комбинацией сигналов, поступавших от конечных выключателей S1 , S2 , S3 , S4,и включением или выключением управлявших электромагнитов К1 и К2 распределителей. Состояние конечных выключателей S1 , S2 , S3 , S4 преобразуется в потенциальные сигналыХ1 , Х2 , Х3 , Х4 (например, с помощью схемы включения, показанной на рис. 2); они подаются на вход системы управления СУ. В зависимости от значения входных сигналов X и требуемой последовательности перемещений система управления СУ вырабатывает сигналы управления У1 и У2 распределителями К1 и К2 .
| Рис. 2. Схема включения |
Составление алгоритма управления роботом.
Граф функционирования привода робота будет иметь вид :

Применительно к системе управления этот граф можно переписать следующим образом:

Таблица 1
Таблица истинности:
| Точка или отрезок | Входы | Выходы | ||||||
| X1 | X2 | X3 | X4 | X5 | Y1 | Y2 | Y3 | |
| O | ||||||||
| OA | ||||||||
| A | ||||||||
| AB | ||||||||
| B | ||||||||
| BC |
На основе графа функционирования систему управления можно описать следующими структурными логическими формулами в виде дизъюнкции конъюнкций:
 После минимизации ДНФ получим конечные выражения:
После минимизации ДНФ получим конечные выражения:

| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КР-02068982-220301-2012-15-ПЗ |
Составление принципиальной электрической схемы цифровой системы управления приводом робота.
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
| КР-02068982-220301-2012-15-ПЗ |
Реализовать полученные логические зависимости можно либо традиционным путем проектирования специализированной логической структуры, либо путем программирования универсальной логической структуры (микропроцессора).
На рис. 3 показан пример реализации системы управления структурным путем с использованием электронных логических элементов. Эта система будет обеспечивать подачу на привод, робота сигналов, реализующих заданный цикл движений. При необходимости обеспечения другой последовательности движений в цикле или иного цикла структура должна быть изменена.
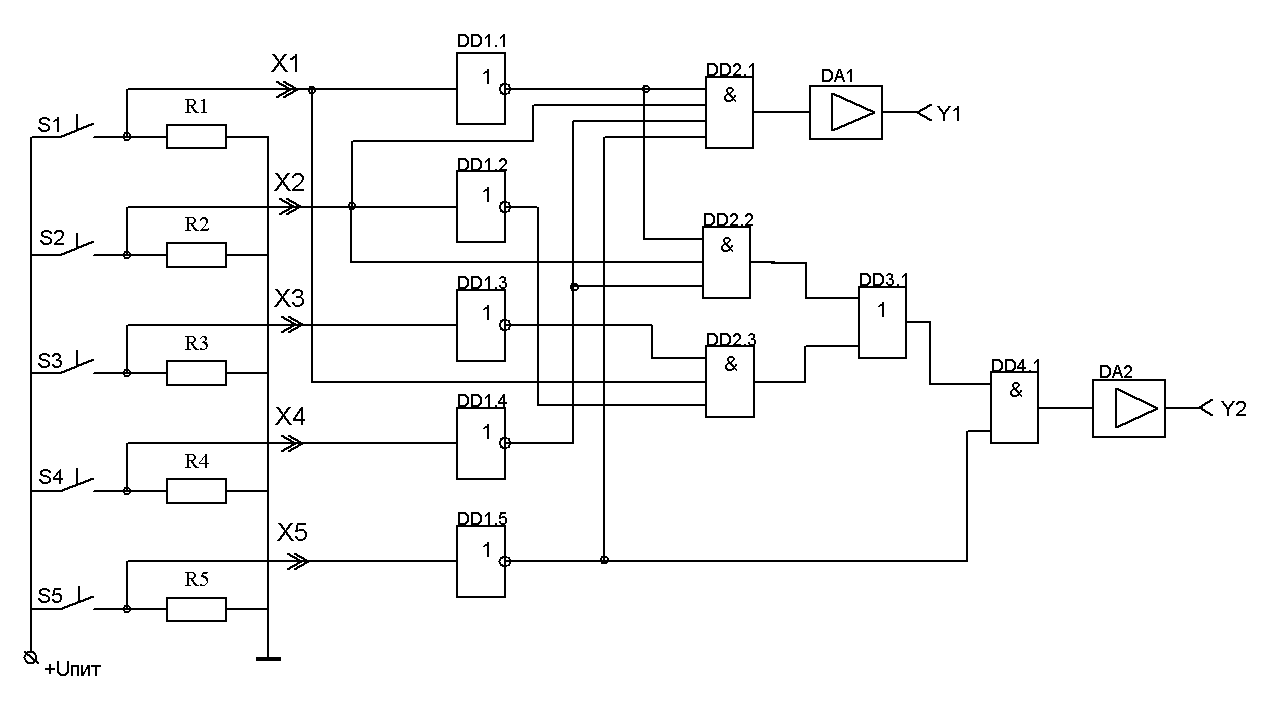
Рис. 3. Принципиальная электрическая схема цифровой системы управления приводом робота на логических элементах
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
| КР-02068982-220301-2012-15-ПЗ |
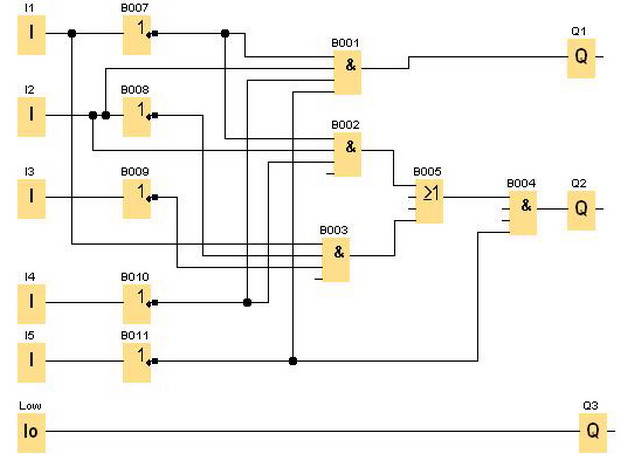
Рис. 4. Схема программирования контроллера LOGO
Вывод: Принципиальная электрическая схема цифровой системы управления приводом робота на логических элементах работает в соответствии с таблицей истинности.
|
из
5.00
|
Обсуждение в статье: Составление принципиальной электрической схемы цифровой системы управления приводом робота. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы