 |
Главная |


Конструкция корпуса робота
|
из
5.00
|
Корпус собран из алюминиевых уголков, объединенных в две прямоугольные детали, соединенные подвижными скобами с закрепленными на них сервоприводами (горизонтальное направление). На внешней части верхней детали прикреплен лист гибкого пластика. На гибком листе закреплены платы контроллеров в два яруса. Две платы контроллеров располагаются на нижнем ярусе, а три платы небольшого размера закреплены на листе гибкого пластика и располагаются вторым ярусом. На втором ярусе располагается плата акселерометра, над вторым ярусом закреплены два датчика-дальномера. Второй ярус и датчики крепятся на металлических стойках. В “задней” части на верхнем листе корпуса закреплены кнопка и рычаг подачи питания на сервоприводы и управляющие схемы соответственно. На нижнем ярусе располагается колодка крепления проводов питания.
Таблица 3. Характеристики конструкции робота
| Параметр | Значение |
| Тип корпуса | продолговатый (прямоугольный с выносами для крепления сервоприводов) |
| Тип конечностей | однорычажные односегментные . |
| Число конечностей | 6 |
| Число степеней свободы | 12 |
| Материал корпуса | Алюминиевый профиль (уголок) |
| Материал конечностей | Стеклотекстолит и алюминий |
| Габариты (ШхВхГ), см | Корпус:14х14х29(включая платы и датчики) Максимальные (включая конечности): 38х19х55 |
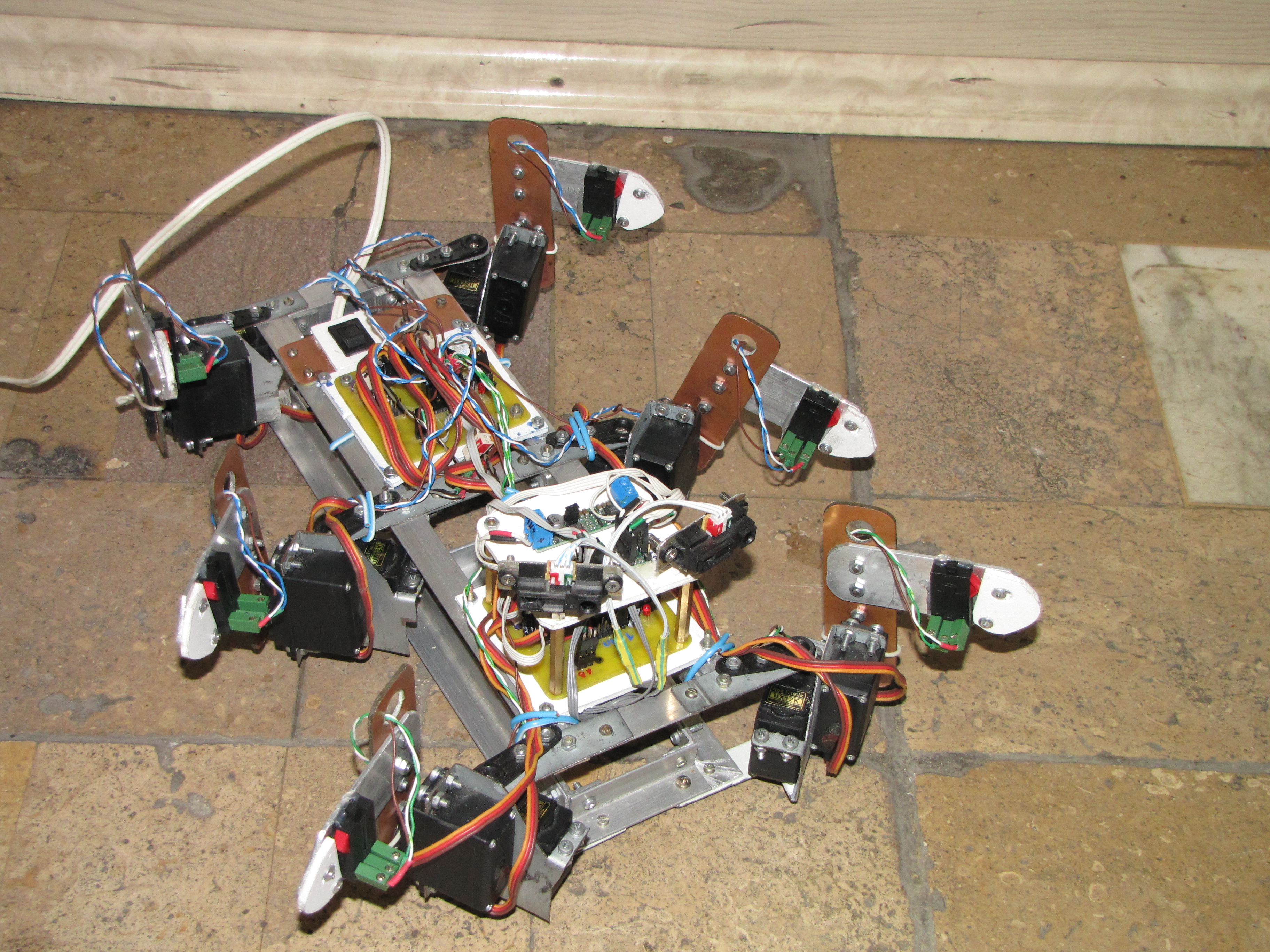
Рис.31 Общий вид корпуса робота
Конструкция конечности
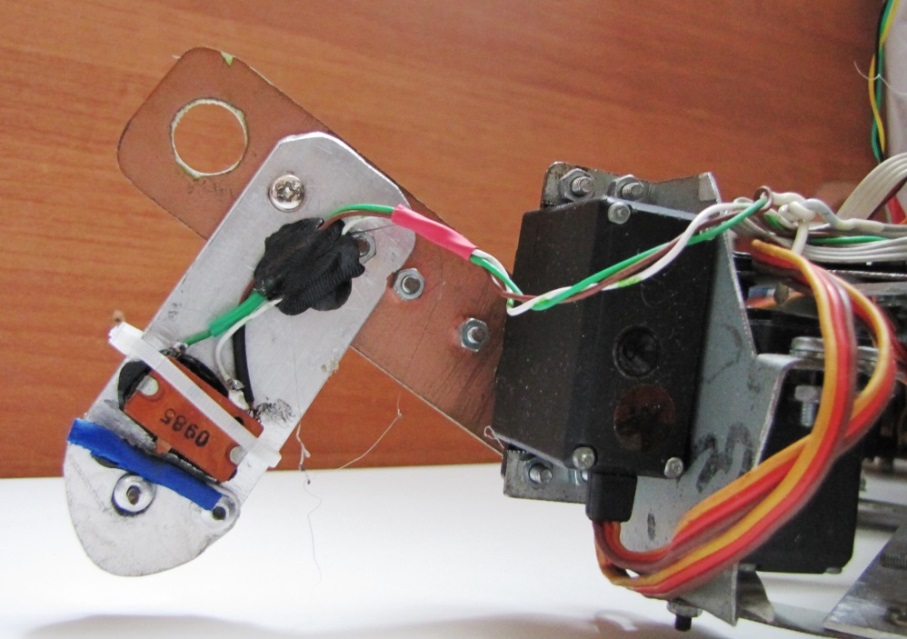 Конечность представляет собой две пластины (алюминиевую и стеклотекстолитовую), соединенные под прямым углом двумя болтами с гайками. Конец алюминиевой пластины срезан по форме треугольника с затупленным концом. Это опорная часть. На ногах закреплены датчики качания, состоящие из микропереключателя и пластины из гибкого пластика. Пластина из стеклотекстолита крепится к сервоприводу вертикального направления. Два привода крепятся на одной скобе, объединяющей пластины корпуса.
Конечность представляет собой две пластины (алюминиевую и стеклотекстолитовую), соединенные под прямым углом двумя болтами с гайками. Конец алюминиевой пластины срезан по форме треугольника с затупленным концом. Это опорная часть. На ногах закреплены датчики качания, состоящие из микропереключателя и пластины из гибкого пластика. Пластина из стеклотекстолита крепится к сервоприводу вертикального направления. Два привода крепятся на одной скобе, объединяющей пластины корпуса.
Рис. 32. Конечность робота Hexapod МР4-2012
Выводы
Для проведения исследования адаптивных алгоритмов шагающих роботов был изготовлен Hexapod МР4-2012 – шестиногий шагающий робот продолговатой формы с 12 степенями свободы, способный передвигаться адаптивно по показаниям датчиков-дальномеров, акселерометра и датчиков касания на ногах
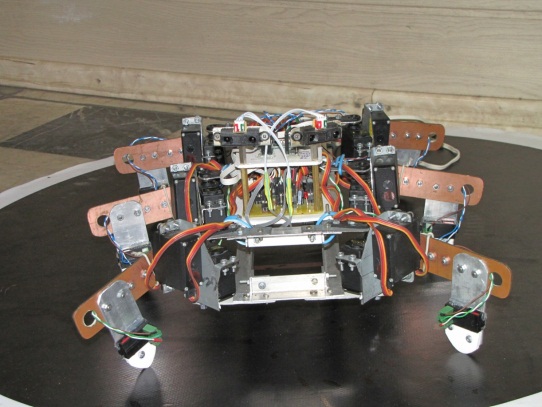
Рис.33 Вид робота Hexapod МР4-2012 спреди
После изготовления робота, исходя и его конструкции и наличия датчиков трех типов: датчиков-дальномеров, датчиков касания и акселерометра можно перейти к разработке адаптивных и неадаптивных алгоритмов передвижения робота.
Алгоритмы передвижения робота
|
из
5.00
|
Обсуждение в статье: Конструкция корпуса робота |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы