 |
Главная |


Формулы преобразования и матрицы преобразования.
|
из
5.00
|
Переход от одной аффинной системы координат к другой с тем же началом. Аффинная координатная система, или аффинный репер о пространстве, есть тройка некомпланарных векторов  данных в определенном порядке и приложенных к точке О — началу репера.
данных в определенном порядке и приложенных к точке О — началу репера.
Тройка векторов называется иногда базисом репера или координатной системы.
Если наряду с репером  который будем условно называть «старым», дан «новый» репер с началом О' и базисом
который будем условно называть «старым», дан «новый» репер с началом О' и базисом  то возникает общая задача преобразования координат: по координатам произвольной точки М (произвольного вектора u) в одной из двух систем координат найти координаты той же Точки (того же вектора) в другой системе.
то возникает общая задача преобразования координат: по координатам произвольной точки М (произвольного вектора u) в одной из двух систем координат найти координаты той же Точки (того же вектора) в другой системе.
Предположим, что оба репера имеют одно и то же начало О. Тогда новый репер вполне определен, если заданы векторы  своими координатами (относительно старого базиса), т. е. если даны коэффициенты
своими координатами (относительно старого базиса), т. е. если даны коэффициенты  в равенствах
в равенствах
 (1)
(1)
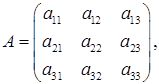
Матрица

называется матрицей перехода от базиса к базису  а также матрицей перехода от первого репера ко второму. Так как векторы
а также матрицей перехода от первого репера ко второму. Так как векторы  линейно независимы, то детерминант матрицы А* отличен от нуля — матрица перехода от одного базиса к другому есть всегда невырожденная матрица. Так как векторы образуют базис, то каждый из векторов в свою очередь однозначно представим как линейная комбинация векторов
линейно независимы, то детерминант матрицы А* отличен от нуля — матрица перехода от одного базиса к другому есть всегда невырожденная матрица. Так как векторы образуют базис, то каждый из векторов в свою очередь однозначно представим как линейная комбинация векторов 
 (1’)
(1’)
- уравнения (1) однозначно разрешимы относительно старых единичных векторов 
Посмотрим, как связаны между собой координаты x , у, г и х', у', г' произвольной точки М (произвольного вектора u = ОМ) в старой и новой координатных системах.
Вектор и=ОМ записывается, во-первых, как линейная комбинация векторов  с коэффициентами х, у, г и, во-вторых, как линейная комбинация векторов
с коэффициентами х, у, г и, во-вторых, как линейная комбинация векторов  с коэффициентами х', у', г', так что имеем тождество
с коэффициентами х', у', г', так что имеем тождество

Вносим в это тождество выражения из (1); получаем


Но вектор u единственным образом представляется как линейная комбинация векторов  , следовательно, коэффициенты при векторах в левой и правой частях последнего равенства должны быть одни и те же, т. е.
, следовательно, коэффициенты при векторах в левой и правой частях последнего равенства должны быть одни и те же, т. е.
 (2)
(2)
Эти формулы и выражают старые координаты х, у, г точки М (вектора u ) через новые. Матрица
 (3)
(3)
дающая это выражение, называется матрицей преобразования координат; она является транспонированной по отношению к матрице А* перехода от базиса  к базису . Обе матрицы имеют один и тот же отличный от нуля детерминант.
к базису . Обе матрицы имеют один и тот же отличный от нуля детерминант.
2. Переход от одной аффинной системы координат к другой с изменением начала координат. Общий случай перехода от репера  к реперу
к реперу  сводится к комбинации двух случаев переноса начала и только что разобранного случая перехода от одного базиса к другому. В самом деле, рассмотрим наряду с двумя реперами
сводится к комбинации двух случаев переноса начала и только что разобранного случая перехода от одного базиса к другому. В самом деле, рассмотрим наряду с двумя реперами  и
и  еще третий, «промежуточный», имеющий начало О' = ( x 0 , y 0 , z 0 ) и базис
еще третий, «промежуточный», имеющий начало О' = ( x 0 , y 0 , z 0 ) и базис  ; координаты точки относительно этого промежуточного репера обозначим через х", у", z ". Тогда х= x 0 + х", у= y 0 + у", z = z 0 + z ", где х", у", z " выражаются через х', у', z ' по формулам (2) (в которых, естественно, надо х, у, z (слева) соответственно заменить на х", у", z ". Получаем окончательно:
; координаты точки относительно этого промежуточного репера обозначим через х", у", z ". Тогда х= x 0 + х", у= y 0 + у", z = z 0 + z ", где х", у", z " выражаются через х', у', z ' по формулам (2) (в которых, естественно, надо х, у, z (слева) соответственно заменить на х", у", z ". Получаем окончательно:
в пространстве:
 (43)
(43)
на плоскости
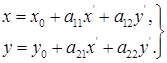 (42)
(42)
Это н есть общие формулы преобразования координат для двух произвольных аффинных координатных систем. Матрица

коэффициентов  в равенствах (43) соответственно (42) называется матрицей преобразования координат.
в равенствах (43) соответственно (42) называется матрицей преобразования координат.
Переход от одной прямоугольной системы координат к другой
Случай прямоугольного репера на плоскости. Можно ограничиться реперами с общим началом. Базис прямоугольного репера состоит из двух взаимно перпендикулярных ортов. Такие базисы будем называть прямоугольными или ортонормальными.
Лемма. Пусть  и
и  — два ортогональных репера на плоскости с общим началом О. Тогда поворотом репера в несущей его плоскости вокруг точки О на некоторый угол
— два ортогональных репера на плоскости с общим началом О. Тогда поворотом репера в несущей его плоскости вокруг точки О на некоторый угол  можно перевести репер либо в репер
можно перевести репер либо в репер  либо в репер
либо в репер  (рис. 59 и 60). Другими словами: репер
(рис. 59 и 60). Другими словами: репер  получается из репера
получается из репера  либо поворотом, либо поворотом и последующим отражением (относительно прямой, несущей вектор
либо поворотом, либо поворотом и последующим отражением (относительно прямой, несущей вектор  ).
).
Доказательство. Репер определяет некоторое положительное направление вращения плоскости, а именно то направление, в котором угол от ортаe1 до орта e2 равен  (а не
(а не  ).
).
Обозначим через угол от орта e1 до орта е1’. Повернув репер (в его плоскости) в положительном направлении на угол , мы совместим орт e1 с ортом е1’; тогда орт e2, будучи перпендикулярен к орту e1, либо совместится с ортом  (рис. 59), либо
(рис. 59), либо
совместится с противоположным ему ортом —  (рис. 60). Утверждение доказано.
(рис. 60). Утверждение доказано.
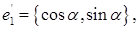
Из доказанного следует, что относительно базиса e1 , e2 орт имеет координаты cos , sin :
тогда как для имеем две возможности:
либо
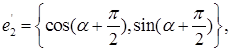
т.е

либо

и тогда

Матрица перехода от базиса  к базису
к базису  имеет вид:
имеет вид:
в первом случае
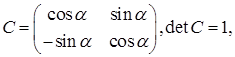 (I)
(I)
во втором
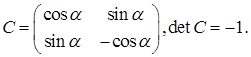 (II)
(II)
Базисы и называются в первом случае одноименными или одинаково ориентированными, а во втором — разноименными или противоположно ориентированными.
Так как detC = l в случае одноименных, detC= -1 в случае разноименных базисов, то только что высказанное определение можно сформулировать и так:
Определение. Два ортогональных базиса (репера) одно-именны, если матрица перехода от одного из них к другому имеет положительный детерминант, и разноименны, если этот детерминант отрицателен.
Формулы преобразования координат даются матрицами, транспонированными к матрицам перехода от одного базиса к другому; это будут формулы:
 в случае однименных базисов,
в случае однименных базисов,
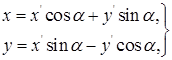 в случае разноименных базисов.
в случае разноименных базисов.
|
из
5.00
|
Обсуждение в статье: Формулы преобразования и матрицы преобразования. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы