 |
Главная |


Выбор электродвигателя
|
из
5.00
|
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к курсовому и дипломному проектированию
Для студентов всех специальностей
Выбор электродвигателя и
Кинематический расчет привода
Утверждено на заседании
кафедры ОКММ
Протокол №1 от 3 сентября 2002
Краматорск 2002
УДК 621.81 (07)
Методические указания к курсовому и дипломному проектированию для студентов всех специальностей. Выбор электродвигателя и кинематический расчет привода / Сост. С.Г. Карнаух. - Краматорск: ДГМА, 2002. –64 с.
Приведена методика кинематического расчета привода и выбора электродвигателя к нему. Содержатся справочные данные по асинхронным короткозамкнутым электродвигателям серии 4А, необходимые данные для кинематического расчета и выбора салазок для электродвигателей.
Составитель: С.Г.Карнаух, доц
ВВЕДЕНИЕ
В настоящих методических указаниях приведены основные сведения, необходимые для обоснованного выбора электродвигателя серии 4А при заданной кинематической схеме привода и нагрузке на выходном валу привода.
Приведена методика кинематического расчета привода, включающего открытые передачи гибкой связью (ременные и цепные) и закрытые зубчатые н червячные передачи (редукторы и коробки скоростей).
Справочный материал позволяет осуществлять выбор электродвигателя и салазок для его крепления, а также выполнять практические расчеты.
Пример расчета иллюстрирует правильность использования предложенной методики.
Общие сведения
Для приведения в движение исполнительных механизмов большинства машин используются проводы, состоящие из двигателей, систем механических передач и муфт, соединяющих отдельные валы. Таким образом, под приводом следует понимать устройство для приведения в действие рабочего органа машины. Наибольшее распространение, благодаря простоте конструкции, достаточной надежности, относительной дешевизне и высокому КПД, получили механические приводы.
Приводы большей части машин допускают использование стандартных двигателей, муфт и механических передач. Механические приводы общего назначения классифицируют по числу и типу двигателя, а также по типу использующихся передач.
По числу двигателей приводы делятся на групповые, oдно- и многодвигателевые.
Групповой привод служит для приведения в движение нескольких отдельных рабочих органов машины. Привод этого типа используется в некоторых металлообрабатывающих станках, в различных строительных и погрузочно-разгрузочных машинах Групповой привод имеет большие габаритные размеры, сложную конструкцию и низкий КПД.
Однодвигателевый привод распространен наиболее широко, особенно в машинах с одним рабочим органом, приводимым в движение от одного двигателя (в большинстве случаев электродвигателя).
Многодвигателевый привод используется в сложных машинах, имеющих несколько рабочих органов или один рабочий орган, потребляющий большое количество энергии (например, конвейер большой длины). Такие приводы используются в подъемно-транспортных машинах, сложных металлообрабатывающих станках и т.п.
По типу двигателей различаются приводы: с электродвигателями, с двигателями внутреннего сгорания, с паровыми и газовыми двигателями, гидро- и пневмодвигателями.
В состав механических приводов могут входить такие типы передач: зубчатые (цилиндрические и конические), червячные, передачи с промежуточной гибкой связью (ременные цепные), передачи винт-гайка. Передачи в приводе могут быть как однотипными, так и комбинированными.
2 Сравнительная оценка механических передач приводов машин
Одной из важнейших инженерных задач при проектировании машин является выбор привода. В некоторых приводах можно вообще обойтись без механических передач (вал электродвигателя напрямую посредством муфты соединяется с валом исполнительного механизма). В других приводах используется две механических передачи и более одного или разных типов. Кинематическим параметром, который определяет потребность использования механических передач в приводе, является ею передаточное число. Общее передаточное число привода определяется отношением частоты (угловой скорости вала двигателя к частоте (угловой скорости) приводного вала исполнительного механизма или рабочего органа машины:


Поскольку частота вращения вала большинства электродвигателей высокая и постоянная или изменяется в незначительных пределах, а частота вращения приводного вала исполнительного механизма обычно достаточно низкая, то передаточное число привода  . Если
. Если  , а изменение направления вращения приводного вала исполнительного механизма можно осуществить за счет реверса двигателя, то приводной вал рабочего органа можно соединять с валом электродвигателя непосредственно с помощью муфты. Во всех остальных случаях составной частью привода являются механические передачи.
, а изменение направления вращения приводного вала исполнительного механизма можно осуществить за счет реверса двигателя, то приводной вал рабочего органа можно соединять с валом электродвигателя непосредственно с помощью муфты. Во всех остальных случаях составной частью привода являются механические передачи.
Возможность использования в приводе машины той или иной механический передачи определяется рядом факторов: особенностями отдельных передач, общим передаточным числом привода, передаваемой мощностью и частотой вращения валов, расстоянием между валами и их взаимным расположением, наличием .необходимых условий технического обслуживания, ресурсом привода и др. Для возможности общей ориентации при проектировании приводов в табл. 1 приведены основные сравнительные характеристики основных типов механических передач, которые чаще всего используются в серийных приводах энергетических, технологических и транспортных машин. Показатели относительных габаритных размеров, массы и стоимости передач приведены в сравнении с зубчатой цилиндрической передачей.
Наиболее рациональным является использование механических передач в виде отдельных механизмов - зубчатых и червячных редукторов, коробок скоростей, вариаторов. Редукторы обладают высокой нагрузочной способностью, малыми габаритными размерами, могут обеспечивать достаточно высокие передаточные числа, просты в эксплуатации. Коробки скоростей применяются в случае необходимости ступенчатого регулирования частоты вращения приводного вала исполнительного механизма или изменения направления его вращения при постоянном направлении вращения вала электродвигателя. Вариаторы обеспечивают возможность плавного бесступенчатого регулирования передаточного числа привода и его реверса. Они позволяют выбирать наиболее выгодные режимы работы машины. Однако вариаторы имеют сложную конструкцию и низкую нагрузочную способность.
Таблица 1 - Сравнительные характеристики основных типов механических передач
| Тип передач | Максимальная мощность, кВт | Максимальная окружная скорость, м/с | Средний КПД | Передаточное число, не более | Относительный габаритный размер | Относительная масса | Относительная стоимость |
| Зубчатая цилиндрическая | 0,98 | ||||||
| Зубчатая коническая | 0,97 | 1,8 | 1,2 | ||||
| Червячная | 0,6…0,8 | 1,5 | 1,1 | 1,6 | |||
| Цепная | 0,96 | 1,6 | 0,8 | 0,4 | |||
| Клиноременная | 0,93 | 0,5 | 0,3 | ||||
| Плоскоре-менная | 0,95 | 0,4 | 0,2 | ||||
| Фрикционная | 0,94 | 1,5 | 0,8 |
Использование в приводах отдельных открытых передач (цепных, ременных) чаще обусловлено компоновкой машины, а также некоторыми их особенностями и преимуществами в сравнении с другие передачами.
3 Общая характеристика двигателеЙ
Для приводов могут использоваться двигатели следующих типов: электродвигатели, двигатели внутреннее о сгорания, гидро- и пневмодвигатели. Тип двигателя выбирается с учетом следующих факторов: назначение машины, для которой проектируется привод, наличие того или иного источника энергии; потребляемая мощность; ограничения по массе, габаритам и условиям работы; режим работы привода и соответствие его механических характеристик условиям работы. Использование в приводах отдельных открытых передач (цепных, ременных) чаще обусловлено компоновкой машины, а также некоторыми их особенностями и преимуществами в сравнении с другие передачами.
Гидро- и пневмодвигатели используются преимущественно в многодвигателевых приводах машин. Энергоносителем таких двигателей служит сжатая жидкость или воздух. Для использования гидро- и пневмодвигателей в приводах отдельных агрегатов машины необходимо иметь соответствующие централизованные системы подачи энергоносителя.
Двигатели внутреннего сгорания наибольшее применение находят в транспорте и приводах энергетических машин - электрогенераторов и компрессоров. Они незаменимы для приводов машин, работающих в отдаленных районах, где отсутствуют линии электропередач. Главный недостаток двигателей внутреннего сгорания – загрязнение окружающей среды продуктами отработанных выхлопных газов
Электродвигатели наиболее широко используются в приводах энергетических, технологических и транспортных машин. Они стандартизованы и выпускаются промышленностью разных типоразмеров в диапазоне мощностей- от 10 Вт до 400 кВт и более. Электродвигатели могут применяться в различных климатических условиях, на открытом воздухе, в запыленных помещениях, во влажных и химически активных средах. Электродвигатели делятся на двигатели постоянного и переменного тока. Двигатели постоянного тока обеспечивают плавное регулирование скоростей и широких пределах, имеют соответствующие механические характеристики, дают возможность добиться достаточной точности движения. Эти двигатели используются в приводах электрических транспортных средств, некоторых подъемных кранов и технологических машин. Двигатели переменного тока бывают однофазные асинхронные (имеют небольшую мощность и используются преимущественно в приводах бытовых машин и устройств), трехфазные синхронные (их частота вращения не зависит от нагрузки, применяют в приводах большой мощности) и трехфазные асинхронные. Последние имеют наибольшее распространение в разных отраслях хозяйства. Их преимущества по сравнению с другими типами двигателей: простота конструкции, меньшая стоимость, более высокая эксплуатационная надежность. К основным типам современных электродвигателей относятся трехфазные асинхронные электродвигатели серий 4A, 4АС, 4АР, МTKF, MTF, МТН. Трехфазные асинхронные двигатели единой серии 4А с короткозамкнутым ротором выпускаются мощностью 0,06…400 кВт и частой вращения ротора 50…355 мм. Такие двигатели используются в приводах машин, к которым не предъявляются особые требования в отношении пусковых характеристик. У асинхронных двигателей различают:  - синхронную частоту вращения ротора (при отсутствие нагрузки) и
- синхронную частоту вращения ротора (при отсутствие нагрузки) и  - фактическую частоту вращения ротора (или номинальную). Синхронная частота вращения, т.е. частота вращения магнитного поля, зависит от частоты тока
- фактическую частоту вращения ротора (или номинальную). Синхронная частота вращения, т.е. частота вращения магнитного поля, зависит от частоты тока  и числа пар полюсов
и числа пар полюсов  :
:
 .
.
Синхронная угловая скорость
 .
.
У нагруженного двигателя частота вращения ротора всегда меньше синхронной:
 ,
,
где s - скольжение:  .
.
При  , при
, при  .
.
Трехфазные асинхронные электродвигатели изготовляют с числом пар полюсов p от 1 до 6. При частоте тока  синхронная частота вращения зависит от :
синхронная частота вращения зависит от :
 .
.
Ряд синхронных частот вращения:  3000;1500;1000;750;600;500 мин-1.
3000;1500;1000;750;600;500 мин-1.
Тихоходные электродвигатели имеют значительные габариты и дороже быстроходных. Поэтому применять электродвигатели с частотой вращения 750 мин-1 и менее следует только в технически обоснованных случаях.
Технические данные электродвигателей серии 4А указаны в ГОСТ 19523-81; их маркировка означат: 4АН - электродвигатели с короткозамкнутым ротором, защищенные от попадания частиц и капель, имеющие предохранение от прикосновения к вращающимся частям, находящимся под током; 4А - электродвигатели с короткозамкнутым ротором, закрытые, обдуваемые (табл. 2); их применяют для привода машин, к которым не предъявляются особые требования.
Электродвигатели 4АР с повышенным пусковым моментом по ГОСТ 20818-75 применяют для привода машин, имеющих значительную пусковую нагрузку (например, в приводах конвейеров, глиномялок, компрессоров, плунжерных насосов и других машин с повышенным трением или значительными инерционными нагрузками).
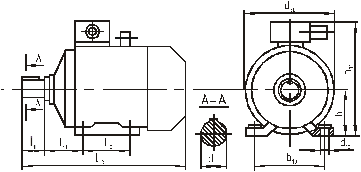
Расшифровка полного обозначения типоразмеров двигателей серии 4А приведена в табл. 2. В табл. 3, 4 и 5 даны основные размеры и масса электродвигателей (рис. 1).
|
| Исполнение 1М 1081 |

|
| Исполнение 1М 2081 |

|
| Исполнение 1М 3081 Рисунок 1 – Электродвигатели серии 4А |
Таблица 2 — Двигатели трехфазные асинхронные короткозамкнутые серии 4А, закрытые, обдуваемые, с высотой оси вращения 50…250 мм (по ГОСТ 19523-81)
| Мощность, кВт | Типоразмер двигателя | Скольжение, % | Номинальная частота, мин-1 | 
| 
|
Синхронная частота вращения 
| |||||
| 0,09 | 4АА50А2УЗ | 8,6 | 2,2 | ||
| 0,12 | 4АА50В2УЗ | 9,7 | 2,2 | ||
| 0,18 | 4АА56А2У3 | 8,0 | 2,2 | ||
| 0,25 | 4АА56В2УЗ | 8,0 | 2,2 | ||
| 0,37 | 4А63А2УЗ | 8,3 | 2,2 | ||
| 0,55 | 4А63В2УЗ | 8,5 | 2,2 | ||
| 0,75 | 4А71А2У3 | 5,9 | 2,2 | ||
| 1,1 | 4А71В2УЗ | 6,3 | 2,2 | ||
| 1,5 | 4А80А2УЗ | 4,2 | 2,2 | ||
| 2,2 | 4А80В2УЗ | 4,3 | 2,2 | ||
| 4A90L2У3 | 4,3 | 2,2 | |||
| 4А100S2УЗ | 3,3 | 2,2 | |||
| 5,5 | 4А100L2УЗ | 3,4 | 2,2 | ||
| 7,5 | 4А112М2УЗ | 2,5 | 2,2 | ||
| 4А132М2УЗ | 2,3 | 2,2 | 1,6 | ||
| 4А160S2УЗ | 2,1 | 2,2 | 1,4 | ||
| 18,5 | 4А160М2УЗ | 2,1 | 2,2 | 1,4 | |
| 4A180S2Y3 | 2,0 | 2,2 | 1,4 | ||
| 4А180М2УЗ | 1,9 | 2,2 | 1,4 | ||
| 4А200М2УЗ | 1,9 | 2,2 | 1,4 | ||
| 4А200L2УЗ | 1,8 | 2,2 | 1,4 | ||
| 4А225М2УЗ | 1,8 | 2,2 | 1,2 | ||
| 4А250S2УЗ | 1,4 | 2,2 | 1,2 |
Продолжение таблицы 2
Синхронная частота вращения 
| |||||
| 0,06 | 4АА50А4УЗ | 8,1 | 2,2 | ||
| 0,09 | 4AA50B4У3 | 8,6 | 2,2 | ||
| 0,12 | 4АА56А4УЗ | 8,0 | 2,2 | ||
| 0,18 | 4А56В4УЗ | 8,7 | 2,2 | ||
| 0,25 | 4АА63А4УЗ | 8,0 | 2,2 | ||
| 0,37 | 4АА63В4УЗ | 9,0 | 2,0 | ||
| 0,55 | 4А71А4УЗ | 7,3 | 2,0 | ||
| 0,75 | 4А71В4УЗ | 7,5 | 2,0 | ||
| 1,5 | 4А80В4УЗ | 5,8 | 2,2 | ||
| 2,2 | 4А90L4УЗ | 4,3 | 2,2 | ||
| 4A100S4У3 | 4,4 | 2,2 | |||
| 4А100L4УЗ | 4,7 | 2,2 | |||
| 5,5 | 4А112M4УЗ | 3,7 | 2,2 | ||
| 7,5 | 4А132S4УЗ | 3,0 | 2,2 | ||
| 4А132М4УЗ | 2,8 | 2,2 | |||
| 4А160S4УЗ | 2,3 | 2,2 | 1,4 | ||
| 18,5 | 4А160М4УЗ | 2,2 | 2,2 | 1,4 | |
| 4A180S4Y3 | 2,0 | 2,2 | 1,4 | ||
| 4А180М4УЗ | 1,9 | 2,2 | 1,4 | ||
| 4А200М4УЗ | 1,7 | 2,2 | 1,4 | ||
| 4А200L4УЗ | 1,6 | 2,2 | 1,2 | ||
| 4А225М4УЗ | 1,4 | 2,2 | 1,2 | ||
| 4А250S4УЗ | 1,2 | 2,2 | 1,2 | ||
| 4А250М4УЗ | 1,3 | 2,2 | 1,2 |
Продолжение таблицы 2
Синхронная частота вращения 
| ||||||
| 0,18 | 4АА63А6УЗ | 11,5 | 2,2 | |||
| 0,25 | 4АА63В6УЗ | 10,8 | 2,2 | |||
| 0,37 | 4А71А6У3 | 9,2 | 2,2 | |||
| 0,55 | 4А71В6УЗ | 2,2 | ||||
| 0,75 | 4А80А6УЗ | 8,4 | 2,2 | |||
| 1,1 | 4А80В6УЗ | 8,0 | 2,2 | |||
| 1,5 | 4А90L6УЗ | 6,4 | 2,2 | |||
| 2,2 | 4A100L6У3 | 5,1 | 2,2 | |||
| 3,0 | 4А112МА6УЗ | 4,7 | 2,2 | |||
| 4,0 | 4А112МВ6УЗ | 5,1 | 2,2 | |||
| 5,5 | 4А132S6УЗ | 3,3 | 2,2 | |||
| 7,5 | 4А132МУ3 | 3,2 | 2,2 | |||
| 4А160S6У3 | 2,7 | 2,0 | 1,2 | |||
| 4А160М6УЗ | 2,6 | 2,0 | 1,2 | |||
| 18,5 | 4А180М6УЗ | 2,7 | 2,0 | 1,2 | ||
| 22,5 | 4А200М6УЗ | 2,3 | 2,0 | 1,2 | ||
| 4А200L6УЗ | 2,1 | 2,0 | 1,2 | |||
| 4А225М6УЗ | 1,8 | 2,0 | 1,2 | |||
| 4А250S6УЗ | 1,4 | 2,0 | 1,2 | |||
| 4А250М6УЗ | 1,3 | 2,0 | 1,2 | |||
Синхронная частота вращения 
| ||||||
| 0,25 | 4А71В8УЗ | 12,7 | 1,7 | 1,3 | ||
| 0,37 | 4А80А8УЗ | 8,9 | 1,7 | 1,6 | ||
| 0,55 | 4А80В8УЗ | 9,0 | 1,7 | 1,6 | ||
| 0,75 | 4А90LА8УЗ | 6,0 | 1,7 | 1,6 | ||
| 1,1 | 4A90LB8У3 | 7,0 | 1,7 | 1,6 | ||
Продолжение таблицы 2
| 1,5 | 4А100L8УЗ | 7,0 | 2,2 | 1,8 | |
| 2,2 | 4А112МА8УЗ | 6,8 | 2,2 | 1,8 | |
| 3,0 | 4А112МВ8УЗ | 5,8 | 2,2 | 1,8 | |
| 4,0 | 4A132S8У3 | 4,1 | 2,2 | 1,8 | |
| 5,5 | 4А132М8УЗ | 4,1 | 2,2 | 1,8 | |
| 7,5 | 4А160S8УЗ | 2,5 | 2,2 | 1,4 | |
| 4А160М8УЗ | 2,5 | 2,2 | 1,2 | ||
| 4А180М8УЗ | 2,6 | 2,2 | 1,2 | ||
| 18,5 | 4А200М8УЗ | 2,3 | 2,2 | 1,2 | |
| 22,5 | 4А200L8У3 | 2,7 | 2,0 | 1,2 | |
| 4А225М8УЗ | 1,8 | 2,0 | 1,2 | ||
| 4А25058УЗ | 1,6 | 2,0 | 1,2 | ||
| 4А250М8УЗ | 1,4 | 2,0 | 1,2 |
Примечания: 1 Первые два знака 4А в обозначении означают номер серии и асинхронный тип двигателя. Последние два знака УЗ означают, что двигатели предназначены для районов с умеренным климатом и работы в закрытых помещениях с естественной вентиляцией (3-я категория размещения). 2 Буква А после первых двух знаков означает, что станина и щиты из алюминия; отсутствие буквы – станина и щиты чугунные или стальные. Далее располагается двух- или трехзначное число, обозначающее высоту вращения в миллиметрах. После высоты оси вращения идут буквы L,M и S, характеризующие установочные размеры по длине станины, или буквы А и В, определяющие длину сердечника статора. Цифры 2,4,6,8 означают число полюсов.
| Таблица 3– Основные размеры и масса электродвигателей серии 4А (исполнение 1М 1081) | 
|

| Таблица 4– Основные размеры и масса электродвигателя серии 4А (исполнение 1М2081) | 
|

| ТТаблица 5– Основные размеры и масса электродвигателя 4А (исполнение 1М 3081) | 
|

Выбор электродвигателя
При выборе электродвигателя кроме синхронной частоты вращения и потребной мощности необходимо определиться с его исполнением, выбор которого зависит от типа и конструкции редуктора или коробки скоростей и условий компоновки привода.
Исходными данными на этом этапе проектирования привода служат принципиальная схема привода (с указанием типов всех передач, входящих в его состав); вращающий момент на выходном валу редуктора (коробки скоростей)  ; частота вращения выходного вала
; частота вращения выходного вала  ; синхронная частота электродвигателя
; синхронная частота электродвигателя  . Расчет потребной мощности привода
. Расчет потребной мощности привода  выполняется по заданной нагрузке на выходном валу и частоте вращения выходного вала с учетом потерь мощности в приводе от вала электродвигателя до выходного вала редуктора:
выполняется по заданной нагрузке на выходном валу и частоте вращения выходного вала с учетом потерь мощности в приводе от вала электродвигателя до выходного вала редуктора:
 , (1)
, (1)
где  - общий КПД привода, учитывающий потери мощности на отдельных звеньях кинематической цепи привода,
- общий КПД привода, учитывающий потери мощности на отдельных звеньях кинематической цепи привода,
 , (2)
, (2)
где  – КПД звеньев кинематической цепи привода, ориентировочные значения которых приведены в табл.6.
– КПД звеньев кинематической цепи привода, ориентировочные значения которых приведены в табл.6.
Таблица 6 – Коэффициенты полезного действия различных механических передач
| Вид передачи | КПД передач | ||||
| закрытых | открытых | ||||
| Зубчатая цилиндрическая | 0,96…0,98 | 0,93...0,95 | |||
| Зубчатая коническая | 0,95…0,97 | 0,92...0,94 | |||
| Червячная при числе заходов червяка: | |||||
| 0,65...0,70 | 0,50...0,60 | ||||
| 0,70...0,70 | 0,60...0,70 | ||||
| 0,85...0,90 | - | ||||
| Цепная | 0,95...0,97 | 0,90.. 0,93 | |||
| Фрикционная | 0,90...0,96 | 0,70... 0,88 | |||
| Ременная | 0,94…0,97 | ||||
| Пара подшипников качения | 0,99…0,995 | ||||
| Пара подшипников скольжения | 0,98…0,99 | ||||
При определении числа заходов червяка можно пользоваться данными табл. 7.
Таблица 7 - Зависимость передаточного числа червячной передачи от числа заходов червяка z1

| Свыше 30 | 16…30 | 8…14 |

|
Для проектного расчета КПД червячной передачи можно принять приближенно [4]
 .
.
По результатам расчетов потребной мощности и синхронией частоте из табл. 2 подбирается электродвигатель со стандартной ближайшей мощностью. Перегрузка асинхронных двигателей допускается до 8%. При невыполнении этого условия следует брать двигатель большей ближайшей мощности. Для выбранного электродвигателя необходимо выписать из табл. 2, 3 следующие основные характеристики, которые представлены в табл. 8.
Таблица 8 – Параметры электродвигателя
| Типоразмер двигателя | Мощность , 
| Синхронная частота nc мин-1 | Рабочая частота nэд, мин-1 | Отношение максимального момента к номинальному Т,max/Tном | Диаметр вала электродвигателя dв, мм |
Расчет потребной мощности электродвигателя в приводах с коробками скоростей производится по той же схеме. При этом необходимо учитывать, что максимальному значению момента на выходном валу соответствует минимальные значение частоты вращения.
5 Кинематический расчет привода
Исходными данными при выполнении кинематического расчета кроме заданной кинематической схемы привода являются синхронная частота вращения вала электродвигателя  и частота вращения выходного вала
и частота вращения выходного вала  редуктора или коробки скоростей.
редуктора или коробки скоростей.
Кинетический расчет привода состоит из следующих основных частей: определения общего передаточного числа; разбивка общего передаточного числа по ступеням; определение кинетической погрешности.
5.1 Определения общего передаточного числа
Общее передаточное число определяется как отношение частоты вращения вала электродвигателя к частоте вращения вала редуктора (коробки скоростей):
 . (3)
. (3)
5.2 Разбивка общего передаточного числа по ступеням
Разбивка общего передаточного числа привода по ступеням при наличии ременной передачи между электродвигателем, и редуктором (коробкой скоростей) заключается в назначении передаточных чисел ременной передачи и каждой ступени редуктора (коробки скоростей). Если же вращающий момент от вала электродвигателя передается посредством соединительной муфты, то выполняется разбивка общего передаточного числа по ступеням закрытой передачи. В каждом из перечисленных случаев общее передаточное число определяется соответствующей зависимостью:
 (4)
(4)
 (5)
(5)
где  – передаточное число ременной передачи;
– передаточное число ременной передачи;
 – передаточные числа соответствующих ступеней закрытой передачи (
– передаточные числа соответствующих ступеней закрытой передачи (  – передаточное число быстроходной ступени -
– передаточное число быстроходной ступени -  ,
,  – в двухступенчатых передачах передаточное число тихоходной ступени, в трехступенчатых передачах передаточное число промежуточной ступени -
– в двухступенчатых передачах передаточное число тихоходной ступени, в трехступенчатых передачах передаточное число промежуточной ступени -  ,
,  – в трехступенчатых передачах передаточное число тихоходной ступени -
– в трехступенчатых передачах передаточное число тихоходной ступени -  ).
).
Передаточное число ременной передачи следует назначить из стандартного ряда передаточных чисел (табл. 9), ограничиваясь значениями от 1 до 2 с целью уменьшения габаритов привода.
Номинальное значение передаточного числа редуктора (коробки скоростей)  определяется по формуле:
определяется по формуле:
 . (6)
. (6)
Таблица 9 – Стандартные значения передаточных чисел (из ГОСТ 2185-76 и ГОСТ 12289-76)
| 1-й ряд | 1,0 | 1,25 | 1,6 | 2,0 | 2,5 | 3,15 | |||||
| 2-й ряд | 1,12 | 1,4 | 1,8 | 2,24 | 2,8 | ||||||
| 1-й ряд | 4,0 | 5,0 | 6,3 | 8,0 | 10,0 | ||||||
| 2-й ряд | 3,55 | 4,5 | 5,6 | 7,1 | 9,0 | 11,2 |
После назначения стандартного значения передаточного числа ременной передачи уточняется частота вращения входного вала редуктора:
 . (7)
. (7)
В приводах без ременной передачи на входе в редуктор частота вращения входного (быстроходного) вала закрытой передачи равна частоте вращения вала электродвигателя:
 . (8)
. (8)
В этом случае номинальное значение передаточного числа редуктора совпадает с общим передаточным числом привода, рассчитанным по формуле (3):
 . (9)
. (9)
Передаточные числа зубчатых одноступенчатых передач приведены в табл. 9. Передаточные числа червячных передач также выбираются из стандартного ряда, значения которого приведены в табл. 10.
Таблица 10 – Номинальные передаточные числа червячных передач по ГОСТ 2144-76
| Uном | 11,2 | 12,5 | 22,4 | ||||||||
| 31,5 | 35,5 | __ |
От разбивки общего передаточного числа в двух- и трехступенчатых редукторах (а также в коробках передач) в значительной степени зависят удобство смазывания колес и компоновки деталей, а также конструкция корпуса и его габариты. Универсальной рекомендацией по разбивке общего передаточного числа по ступеням, удовлетворяющих всем указанным условиям, не существует. Выбор способа разбивки зависит от конкретных требований, которым должна отвечать конструкция: обеспечения минимальных габаритов редуктора, минимальной массы зубчатых колес, получения одинакового погружения зубчатых колес всех ступеней в масляную ванну, создание устойчивой наименьшей площади корпуса редуктора и другое. Стандартные значения передаточных чисел для одно-, двух- и трехступенчатых редукторов и их разбивка по ступеням приведены в табл. 11.
Таблица 11 – Рекомендуемые передаточные чисел цилиндрических зубчатых редукторов и их разбивка по ступеням
| Передаточное число редуктора | |||
| Одноступенчатого редуктора u | Двухступенчатого трехосного (развернутая схема) u=uбuт | Двухступенчатого соосного u=uбuт | Трехступенчатого* u=uбuтuп |
| 1,25 | 8=2´4 | 8=2,5´3,15 | 40=2´4´5 |
| 1,4 | 9=2,24´4 | 9=2,8´3,15 | 45=2,24´4´5 |
| 1,6 | 10=2,5´4 | 10=3,15´3,15 | 50=2,5´4´5 |
| 1,8 | 11,2=2,8´4 | 11,2=2,8´4 | 56=2,8´4´5 |
| 12,5=3,15´4 | 12,5=3,1´4 | 63=3,15´4´5 | |
| 2,24 | 14=3,15´4,5 | 14=3,55´4 | 71=3,15´4,5´5 |
| 2,5 | 16=3,55´4,5 | 16=4´4 | 80=3,55´4,5´5 |
| 2,8 | 18=4´4,5 | 18=4´4,5 | 90=4´4,5´5 |
| 3,15 | 20=4,5´4,5 | 20=4,5´4,5 | 100=4,5´4,5´5 |
| 3,55 | 22,4=4,5´5 | 22,4=4,5´5 | 112=5´4,5´5 |
| 25=5´5 | 25=5´5 | 125=5´5´5 | |
| 4,5 | 28=5,6´5 | 28=5´5,6 | 140=5´5´5,6 |
| 31,5=6,3´5 | 31,5=5´6,3 | 160=5,6´5´5,6 | |
| 5,6 | 35,5=6,3´5,6 | 35,5=5,6´6,3 | 180=6,3´5´5,6 |
| 6,3 | 40=7,1´5,6 | 40=6,3´6,3 | 200=6,3´5,6´5,6 |
| 7,1 | 45=8´5,6 | 45=6,3´7,1 | 224=6,3´5,6´6,3 |
| 50=9´5,6 | 50=7,1´7,1 | 250=7,1´5,6´6,3 |
Примечание: 1 Фактическое общее передаточное число редуктора может иметь отклонение от номинального не более 4%. 2 uб ,uт , uп – передаточное число соответственно быстроходной, тихоходной и промежуточной ступеней.
3 Приведенные под звездочкой (*) данные можно пользоваться для конических и цилиндрических редукторов, назначая для быстроходной конической ступени число не более 4 (в крайнем случае до 6,3).
При разбивке общего передаточного числа в двухступенчатых редукторах можно пользоваться рекомендациями, приведенными в табл. 12. Рассчитанные по предложенным зависимостям передаточные числа ступеней округляют до стандартного ближайшего значения (см. табл. 10), после чего по формулам (4), (5) определяется фактическое значение общего передаточного числа привода. Для двух- и трехступенчатых редукторов фактические общие передаточные числа соответственно равны:
 , (10)
, (10)
 . (11)
. (11)
Поскольку частоты вращения выходных валов коробок представляют геометрическую прогрессию со знаменателем  , то по заданной минимальной частоте
, то по заданной минимальной частоте  соответствующей максимальному моменту
соответствующей максимальному моменту  , рассчитываются остальные частоты:
, рассчитываются остальные частоты:  ,
,  и так далее. Наиболее употребительные значения
и так далее. Наиболее употребительные значения  Разбивка по ступеням выполняется для всех возможных скоростей вращения выходного вала. Обычно расстояние между опорами в коробках скоростей больше, чем в редукторах. Поэтому для них рекомендуется в начале кинематической цепи принимать меньшие передаточные числа, а в конце – больше. Это положение обеспечивает не резкое, а постепенное увеличение габаритов передач, валов, опор. Для блочных пар рекомендуется принимать
Разбивка по ступеням выполняется для всех возможных скоростей вращения выходного вала. Обычно расстояние между опорами в коробках скоростей больше, чем в редукторах. Поэтому для них рекомендуется в начале кинематической цепи принимать меньшие передаточные числа, а в конце – больше. Это положение обеспечивает не резкое, а постепенное увеличение габаритов передач, валов, опор. Для блочных пар рекомендуется принимать  .
.
5.3 Расчет кинематической погрешности
Оценка погрешности кинематического расчета редуктора заключается в расчете ошибки фактического передаточного числа (10), (11) относительно номинального (6)
 . (12)
. (12)
Кинематический расчет читается выполненным удовлетворительно, если выполняется неравенство
 , (13)
, (13)
где [Du] – допускаемое значение относительной погрешности. Для одноступенчатых редукторов [Du]=2,5%, для двухступенчатых ред
|
из
5.00
|
Обсуждение в статье: Выбор электродвигателя |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы