 |
Главная |


Общая ЗЛП. Канонический вид ЗЛП
|
из
5.00
|
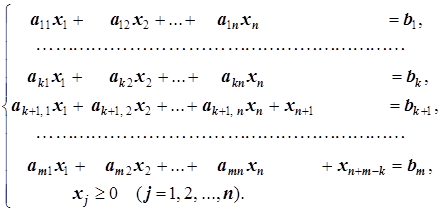
2.1. Общая ЗЛПформулируется в виде (1.2). Другими словами, ЗЛП в общем виде ставится как (1.2).
Таким образом, имея дело с ЗЛП, мы будем иметь дело с линейной системой. В теории линейных систем x1, x2, …, xn мы называли неизвестными. В оптимизации функции f(x1, x2, …, xn) они выступают в качестве переменных. Поэтому к ним мы будем применять этот термин. От этого их суть не меняется: необходимо найти (неизвестные) переменные x1, x2, …, xn, при которых целевая функция f(x1, x2, …, xn) достигает экстремума. Также, мы сохраняем терминологию линейных систем: основная и расширенная матрица, совместные системы, ранг системы, базисное решение и т.д. Так же, будем считать, что ранг r системы совпадает с числом m уравнений и неравенств: r=m.
Канонический вид ЗЛП
Если в системе ограничений задачи (1.2) присутствуют только уравнения, а свободные члены в системе ограничений задачи являются неотрицательными, то говорят, что задача имеет канонический вид. Согласно 1.2.2 первой части, любая смешанная система приводится к системе уравнений добавлением дополнительных неотрицательных переменных со знаком «+» в неравенства типа «≤» и со знаком «-» в неравенства типа «≥». Поэтому для приведения к каноническому виду задачи линейного программирования поступаем следующим образом:
1) Если в системе ограничений задачи имеется ограничение с отрицательной правой частью, то умножаем его на -1.
2) Добавляем в каждое неравенство дополнительные неотрицательные переменные: со знаком «+» в неравенства типа «≤» и со знаком «-» в неравенства типа «≥».
Таким образом,
2.2.1. ОЗЛП (1.2) приводится к каноническому виду
c1x1+c2x2+…+cnxn®max(min)
2.2.2. ЗЛП (1.4) приводится к каноническому виду
c1x1+c2x2+…+cnxn®max

А также
2.2.1. ЗЛП (1.5) приводится к каноническому виду
c1x1+c2x2+…+cnxn®min

В любом случае можно считать, что ЗЛП имеет канонический вид
c1x1+c2x2+…+cnxn®max(min)
 (2.1)
(2.1)
Если A=(aij) - матрица системы ограничений задачи, X=(x1, x2, …, xn)T - столбец переменных, B=(b1, b2, …, bn)T - столбец свободных членов системы ограничений и C=(c1, c2, …, cn) - вектор коэффициентов целевой функции, то задачу (2.1) можно записать в матричной форме:
CX®max(min)
AX=B, X≥O.
Обозначим через A1, A2, …, An соответственно 1-й, 2-й, …, n-й столбцы матрицы A. Тогда задачу (1.6) можно записать в векторной форме:
CX®max(min)
A1x1+A2x2+…+Anxn=B,
X≥O.
2.3. Упражнение. Привести к каноническому виду задачи линейного программирования из предыдущих заданий 1) - 3), выписать их матрицы ограничений, столбцы свободных членов, векторы условий, векторы коэффициентов целевых функций, и записать задачи в матричной и векторной формах.
Решение. 1г) 4x1+x2®min(max)
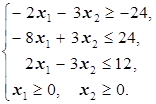
Правая часть первого неравенства - отрицательная. Поэтому первое неравенство умножаем на -1:

Теперь все неравенства ограничений имеют тип «£». Поэтому во все эти неравенства вводим дополнительные неотрицательные переменные, соответственно x3, x4, x5:

Таким образом, канонический вид задачи - следующий:
4x1+x2 ® max

Матрица ограничений (выписываем для канонического вида):  ,
,  - столбец свободных членов, A1=
- столбец свободных членов, A1=  , A2 =
, A2 =  , A3=
, A3=  , A4=
, A4=  , A5=
, A5=  - векторы условий, (4, 1, 0, 0, 0) - вектор коэффициентов целевой функции,
- векторы условий, (4, 1, 0, 0, 0) - вектор коэффициентов целевой функции, 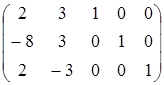 ×
×  =
=  , ³O - матричная форма записи задачи,
, ³O - матричная форма записи задачи,  x1+
x1+  x2+ x3+ x4+ x5= -
x2+ x3+ x4+ x5= -
- векторная форма записи задачи.
|
из
5.00
|
Обсуждение в статье: Общая ЗЛП. Канонический вид ЗЛП |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы