 |
Главная |


Качественная теория решения нелинейных диффе-
|
из
5.00
|
ренциальных уравнений (в приложении к нелинейным систе-
мам)
В отличие от численного метода (Метод Эйлера), который
дает решение в 1й точке ( не дает траекторию (нужно де-
лать 1000 точек, чтобы получить траекторию)).
Пуан Каре в 19 веке дал качественную теорию решения диф-
ференциальных уравнений, она используется для решения не-
линейных дифференциальных уравнений в виде некоторого фа-
зового портрета (некоторый графический материал, по ко-
торому можно анализировать траекторию движения динамичес-
кой системы, т.е. фактически получить решение (1-го из
решений).
На примере X и Y :


 y (1)
y (1)  , где
, где 



 f(x,y) - некоторая нели-
f(x,y) - некоторая нели-





 a dy нейная функция
a dy нейная функция



 - нелинейная
- нелинейная
функция



 x
x
Найти решение означает - найти y=j(x) (2),
которая удовлетворяет (1).
Пуан Каре развил метод , как найти (2) прямо на
плоскости.
Метод изоклин
Если f(x,y)=const, то  , а
, а  , на кривой
, на кривой
f(x,y)=const все производные имеют одно и тоже значение,
такая кривая называется изоклиной. (tga=const, a=const)
Можно вычислить множество изоклин, это множество дает по-
ле направлений. Касательная к этому полю и есть решение,
т.о. это есть траектория, которую мы разыскиваем.


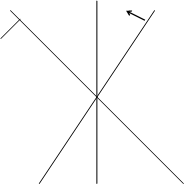
 y Пример1:
y Пример1:  ;
; 



 y
y
 | |||
 | |||




 - решение диф. - изоклина
- решение диф. - изоклина
уравнения







 |
x
 |

 x
x
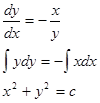
Пример 2: 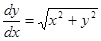 ,
, 
Величина радиуса - значение производной, любая окружность - изоклина. Решение (касательная к полю направления) -
-есть касательная к векторам, расположенная на изоклинах.
















- изоклина
решение
 - Уравнение Вандер Поля
- Уравнение Вандер Поля
x(t) - напряжение на контуре автогенератора, фазовая пе-
ременная
 = const - параметр
= const - параметр
 - вторая фазовая переменная
- вторая фазовая переменная
Учитывая это имеем :
(1) ’ 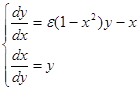 пусть = 0
пусть = 0
(1) ’’ 
 |







 - изоклина
- изоклина
 | |||||||
 | |||||||
 | |||||||
 | |||||||

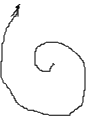
 - фазовый портрет
- фазовый портрет


 - Решение дифференциаль-
- Решение дифференциаль-




 ного уравнения Вандер
ного уравнения Вандер


 Поля - окружность
Поля - окружность
(при = 0)
 | |||
 | |||
Если на входы X и Y осцилографа подать две синусоиды, то
получим окружность (фигура Лиссажу), следовательно окруж-
ность дает решения синусоидального колебания.




 x Y
x Y
 |  |  |  |











 t t
t t
Пусть ¹ 0 (см. ур-е (1)’) фазовый портрет будет 2х ти-
 пов :
пов :







 Y X(t)
Y X(t)
 | |||
 | |||



 X
X










 t
t
Выводы :
1) Динамические системы радиоавтоматики описыва-
ются дифференциальными уравнениями 1, 2 и бо-
лее высокого порядка ( например: колебатель-
ная система(солнечная система, автогенератор,
полет космического аппарата в поле притяже-
ния земли) описывается диф. уравнением 2-го
порядка и выше.
2) Линейные динамические системы описываются ли-
нейными диф. уравнениями. Линейная динамичес-
кая система составленная из R,L,C - цепочек и
активных элементов (транзисторов и т.д.).
Любая линейная система путем преобразования
Лапласа может быть представлена в виде пере-
даточной функции.(Диф. уравнение преобразует-
ся по Лапласу). Передаточная функция записы-
вается для удобства в комплексном виде, на
мнимой оси p=jw можно найти АЧХ и ФЧХ линей-
ной системы. Передаточная функция дает инфор-
мацию об устойчивости системы.
3) Нелинейные динамические системы описываются
нелинейными диф. уравнениями, в этих системах
обязательно есть нелинейность вида ( 
и др.), общих решений и анализа через переда-
точную функцию как правило не существует, по-
этому есть два метода :
а) численный метод (Эйлера и др.) (восстановле-
ние по точкам)
б) решение диф. уравнений методом фазового порт-
рета (качественная теория). (Это наглядный
путь выяснения поведения нелинейной системы)
Стохастические системы
Стохастика - случайность.
Определение: Динамическая система называется стохастичес-
кой , если она описывается дифференциальным
или разностным уравнением, в правую часть
которого входит случайный процесс.
Такую систему можно представить в виде линейного или не-
линейного четырехполюсника, на вход которого подается шум
 |
Стохастическая

 x(t) система X(t)
x(t) система X(t)
x(t)- шум
X(t)- выходной процесс
Составление модели любой динамической системы должно
в реальных условиях(например движение самолета или раке-
ты) составляться с помощью предварительных экспериментов
над движением реальной системы. (Как правило это диффе-
ренциальные или разностные уравнения) и в эти уравнения
вставляется некоторый шум, который является случайным
процессом.
Для дальнейшего составления модели используется иден-
тификация модели на основании эксперимента или экспери-
ментальных данных.
Идентификацией называется оценка коэффициентов разност-
ного уравнения и оценка параметров шума:
дисперсии, мат. ожидания, ковариации и др.
Идентификация служит для того, чтобы реальный процесс и
модель были близки.Получив модель мы имеем возможность,
используя эту модель, получить близкую к реальной карти-
не ситуацию движения системы и создать управление ситуа-
цией по нашей модели.
Вывод: Модель нужна, чтобы на ЭВМ научиться проектировать
управляемые динамические системы для любых такти-
ческих ситуаций, известных из практики.
Правильно созданная модель - это максимум успеха в проек-
тировании эффективной систе-
мы. После создания и отработки модели стохастической ди-
намической системы создается аппаратура по этой модели,
которая проверяется на динамическом стенде.
Динамический стенд - 2й этап моделирования реальной ситу-
ации уже с аппаратурой.
3й этап состоит в проверке аппаратуры на полигоне.( На
борту транспортного или военного средства).
|
из
5.00
|
Обсуждение в статье: Качественная теория решения нелинейных диффе- |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы